Odyssey raises $310M Series B for world models
Building AI that can understand and simulate the world.


Learning the world from pixels
A decade ago, the AI community was alight with enthusiasm over the first generative models for images, Generative Adversarial Networks. At the time, the model's outputs looked more like a Microsoft Paint attempt than anything close to photorealism. Ten years later, Latent Diffusion Models, and the scaled-up, improved architectures since built by the team at Black Forest Labs, have ushered in a level of photorealism arguably indistinguishable from reality, were it not for the unreal scenes:
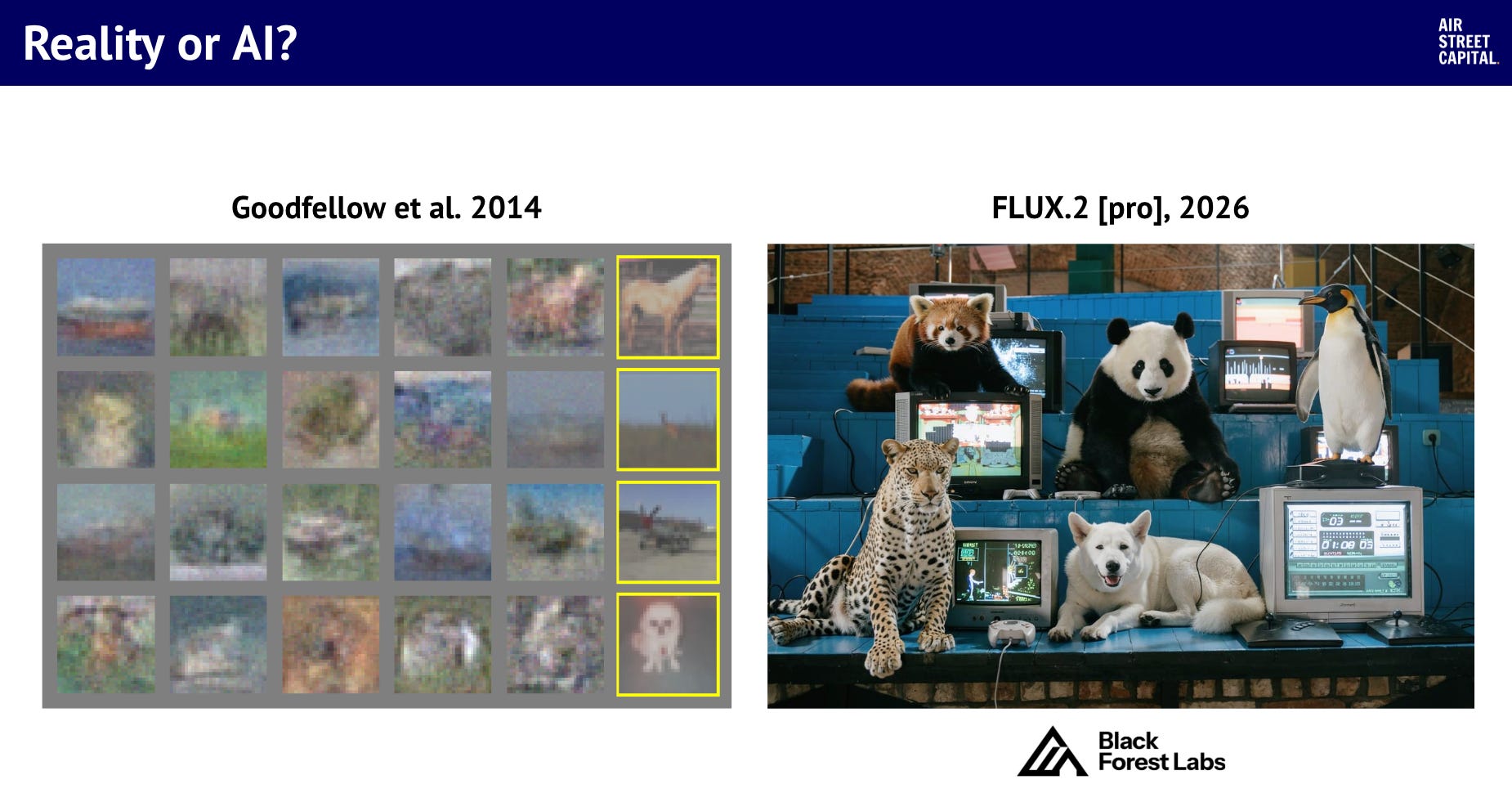
The same trajectory from “pixelated if you’re lucky” to “I can’t tell the difference between reality and AI” is happening in the domain of world models, and Odyssey is leading the frontier.
Last week, Odyssey announced that it has raised a $310M Series B at a $1.45B valuation, led by Natural Capital, with participation from Amazon, GV, AMD Ventures, EQT, IQT, and others. We wrote the first check into Odyssey's seed in late 2023.
On a personal note, I have known both founders far longer than Odyssey has existed: Oliver Cameron from his years building Voyage and then Cruise (the first self-driving car I experienced thanks to him!), and Jeff Hawke from the founding team at Wayve, where I was involved from day 1. I invited Oliver to speak at RAAIS 2023 in London, which created an opportunity for the two of them to spend significant time together in person. They started Odyssey later that year.
This round is a good moment to explain what the team has actually been building. The answer is more interesting than “AI video.”

From videos to worlds
A world model is not a video generator. Sora, Veo, Kling, and their successors take a prompt and render a fixed clip. The output can be beautiful, but the future is locked from the outset of generation. As a consumer of the video, your only mode of interaction is to watch.
By contrast, a world model is closer to a simulator than a renderer. It predicts the next state of an environment from the past and from whatever a participant does next. It accepts input mid-rollout. It holds a persistent state, a memory of the world that can be acted on and changed. Just as next-token prediction enabled language modeling, Odyssey is betting that next-state prediction, at enough scale, forces a model to learn physics, because a model that has not learned physical regularities drifts into nonsense over a long rollout.
The path to frontier world models
Scale is necessary, but not sufficient. The bottleneck is experience, and over the past year Odyssey has attacked it from three directions: 1) making each moment richer, 2) making experience shared and persistent for people and agents, and 3) teaching models to generate their own.
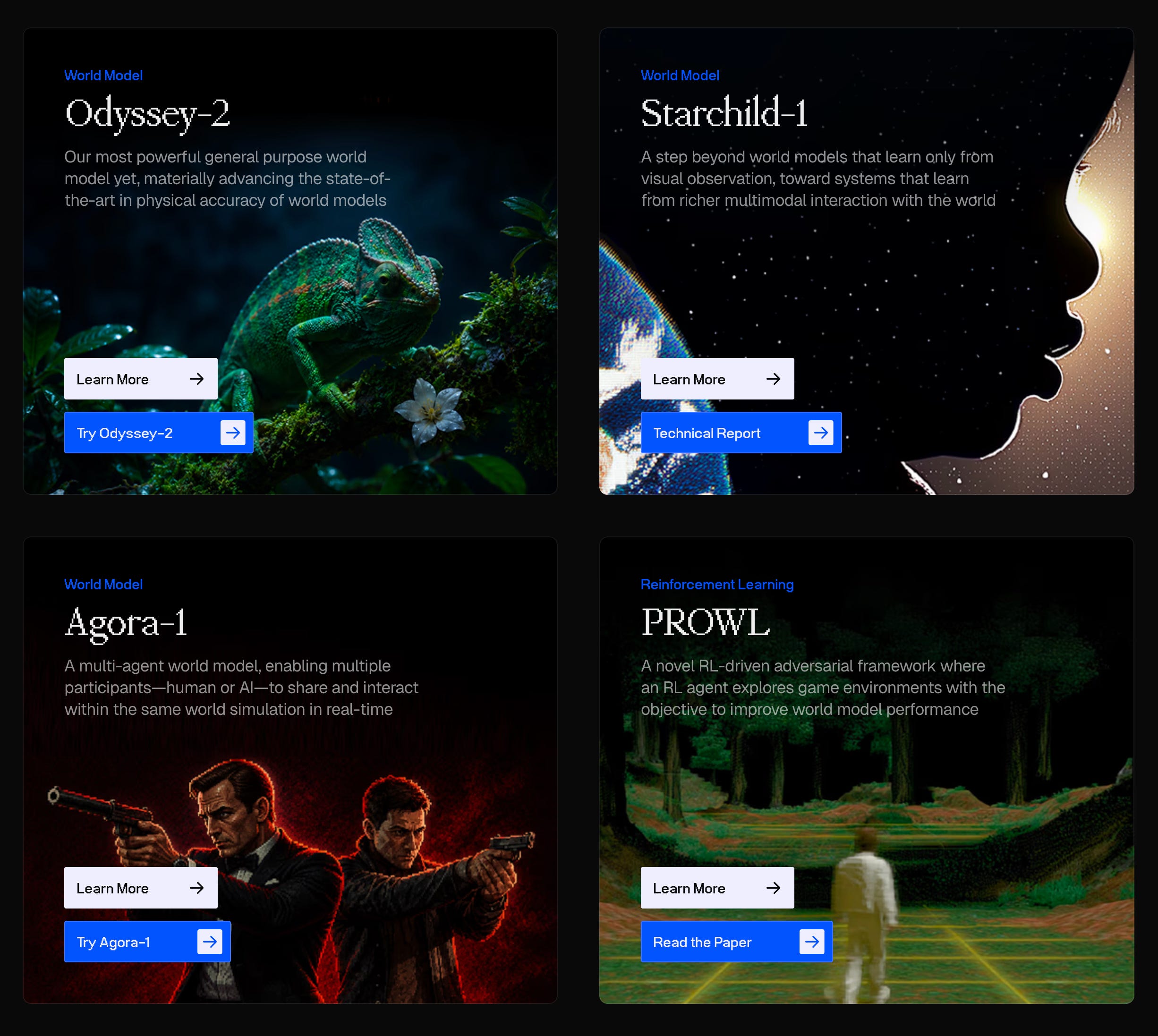
First, richer experience. Most world models are mute, which is not only bizarre to experience but means that a rich information stream is discarded. Sound is where collisions, distance, intent, rhythm, and emotion live. Nothing is in the intellect, as the line goes, that was not first in the senses. As such, Odyssey’s Starchild-1 generates synchronized audio and video in real time, while responding continuously to streaming text, speech, and action. This is the first real-time multimodal world model.
While this sounds logical, the hard part is that audio and video move on different clocks. A small error in one modality can corrupt the other during a long rollout. Starchild-1’s approach is to let each run on its own clock while staying synchronized, turning a bidirectional audio-video foundation model into a causal, real-time world model.
Second, shared experience. Agora-1 is a multi-agent world model that decouples simulation from rendering. One function evolves a shared world state from player actions, while another renders consistent views of that state from independent viewpoints. The result behaves like a game engine with no hand-coded engine underneath: a shared state the model maintains for every participant, which can be edited into new levels while the dynamics hold.
At RAAIS in London on June 12, Jeff Hawke, Odyssey's CTO, ran a live session of an Agora-1-generated GoldenEye death match, with every frame conjured on the fly. Attendees could join the game and play one another in real time.
Beyond games, robots need shared environments before they touch the real world. Agents need places to collide, coordinate, compete, and fail. Simulators need to cover worlds that have never existed. Odyssey is pursuing all of these directions with design partners it will name in time.
Third, self-generated experience. PROWL is a reinforcement learning agent rewarded for breaking the world model: freezing a waterfall, losing a crosshair, popping geometry under the camera, ignoring a control input, or collapsing through a hard scene transition. Through active exploration, an agent can therefore improve a world model.
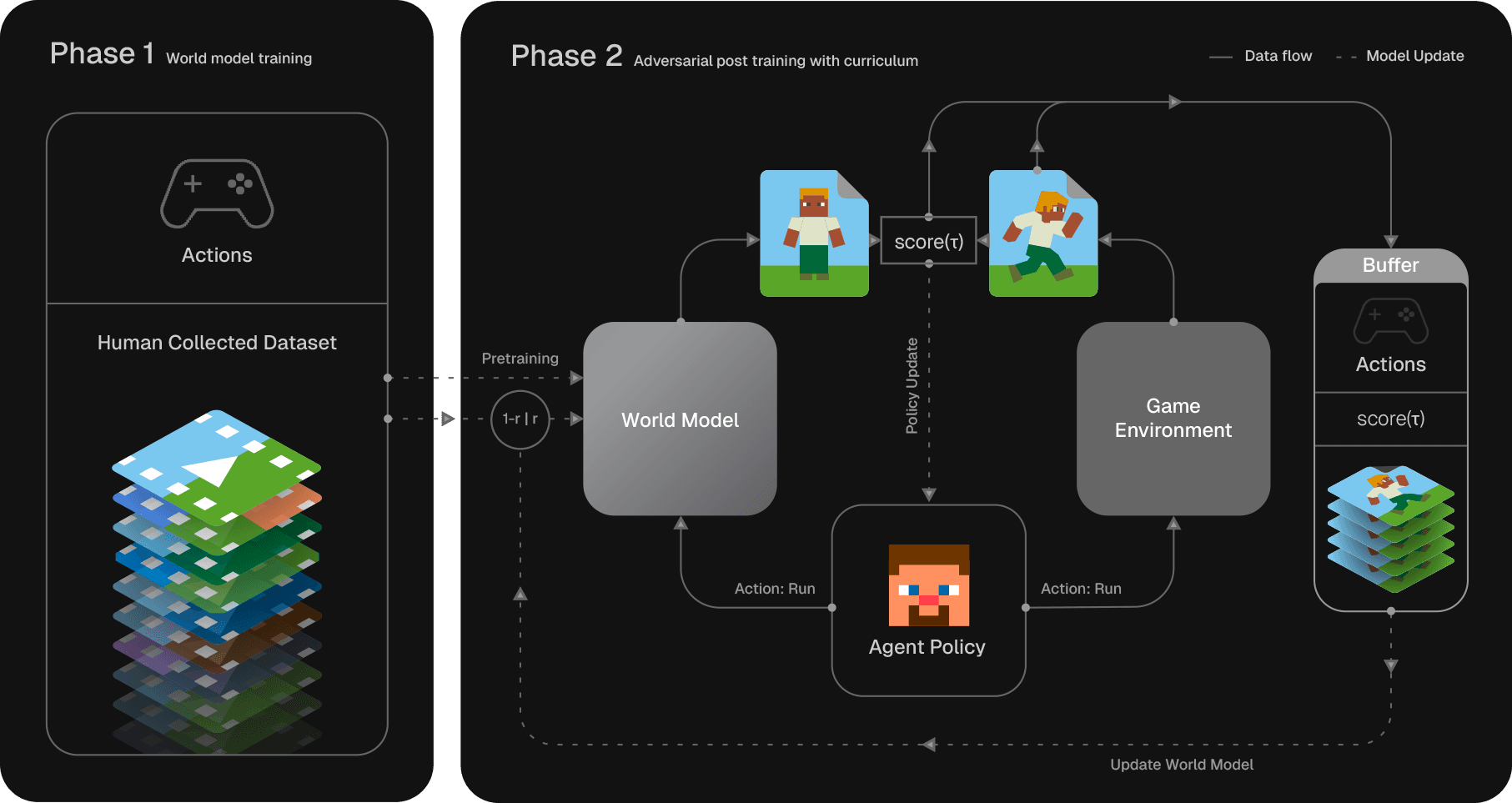
Readers may recall OpenAI’s “Faulty reward functions in the wild” from 2016, where an RL agent steering a boat learned to rack up points by spinning in circles instead of finishing the race. RL agents are unreasonably good at finding the cracks in a system. PROWL points that talent at the world model itself: the agent hunts a weakness, the model trains it away, and the agent comes back for a harder one. It is a way to manufacture the experience these models are short of.

Why Odyssey
When we first invested, we wrote that great research is never enough on its own. The teams that win pair it with execution, product taste, and a feel for where the customer needs to go next.
Oliver Cameron and Jeff Hawke came out of self-driving, where the job is to break an impossible physical AI problem into tractable pieces, simulate the world, make the model robust and generalizable. Odyssey’s shipping cadence since their seed round continues to accelerate: Odyssey-2 Max for scale and physics, Starchild-1 for multimodal grounding, Agora-1 for shared state, and PROWL for closed-loop improvement.
Odyssey is betting that the next leap in machine intelligence comes from systems that build worlds, act inside them, and learn how reality behaves. If that is right, the lead in robotics, agents, and simulation goes to whoever can generate the richest experience fastest. We wrote the first check because we think Oliver, Jeff, and the team are the ones who will.